Abstract
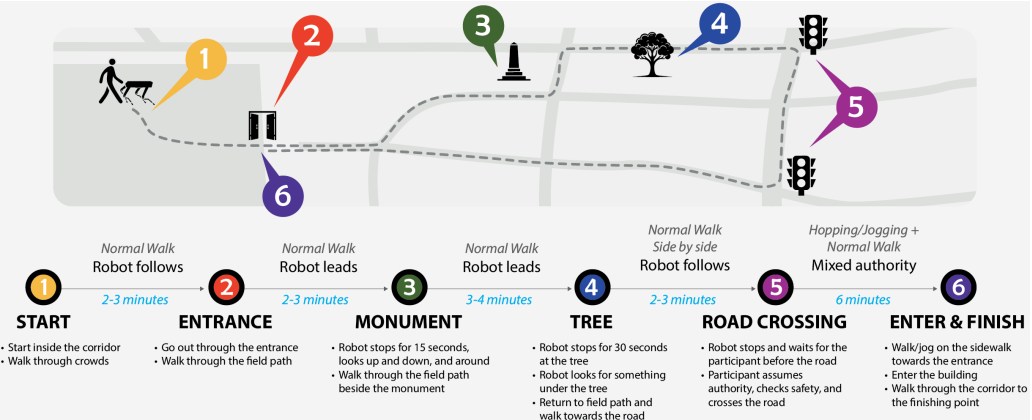
Walking is an essential aspect of daily life, while walking with companions offers numerous benefits. Recently developed mobile robots, through their ability to navigate challenging terrains, open new possibilities for outdoor walking companionship. Yet, little is known about how such companions shape the human walking experience. In this study, nine participants walked outdoors with a robot and later reflected on their walking experience in semi-structured interviews. Thematic analysis showed that the robot influenced how participants related to it, how they managed proximity, and how their attention, control, and social presence were affected. Building on these insights, we identify five key dimensions of human–robot walking: attunement, awareness mediation, proxemics, social perception, and playful curiosity. These dimensions capture how walking with robots transforms this ordinary activity into a co-experienced practice and additionally offer concrete design implications for designing and creating more meaningful, comfortable, and socially attuned human-robot walking interactions.
Role: Supervisor
Type: Full Paper
Conference: Proceedings of the 2026 CHI Conference on Human Factors in Computing Systems
Stats: Acceptance rate: 25.1%, h5-index: 134
Date: 2026
Co-Authors: Eshtiak Ahmed, Çağlar Genç, Velvet Spors and Juho Hamari